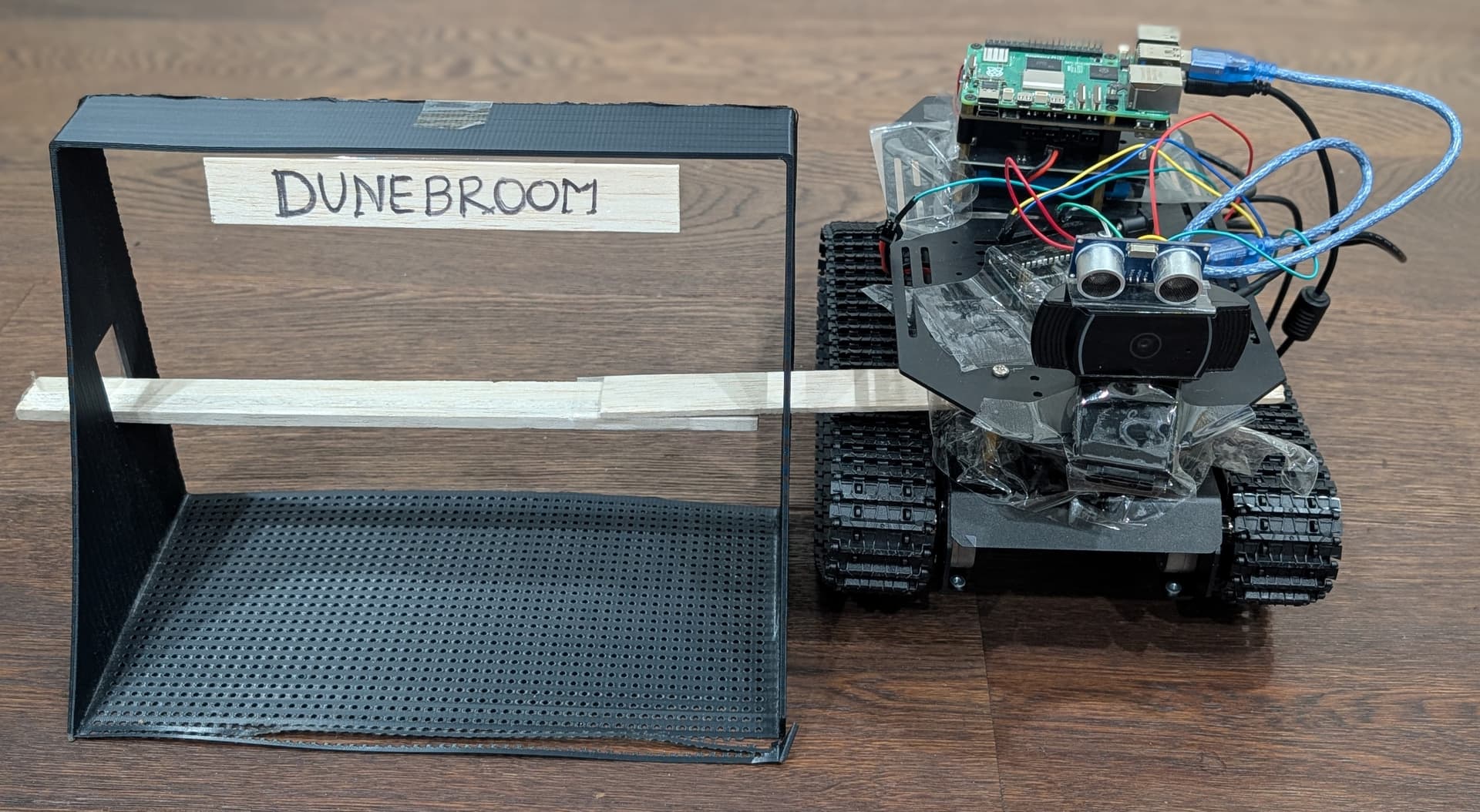
DuneBroom
Autonomous beach cleaning powered by machine learning
DuneBroom is a low-cost autonomous beach-cleaning robot that combines machine-learning-based vision and mechanical sieving to efficiently identify and collect debris from soft-sand environments.
The Project
Overview
The Problem
Each year, approximately 8 million metric tons of plastic enter the oceans, with much of it washing up on shores, posing a serious threat to marine ecosystems. Hundreds of thousands of volunteers every year around the world put in the hours to remove this trash from the beaches, but only <1% of the trash gets removed given the sheer volume.
Hypothesis
This project investigates whether DuneBroom, a low-cost autonomous beach-cleaning robot combining machine-learning-based vision and mechanical sieving, can efficiently identify and collect both large (≥ 20 mm, e.g., bottle caps) and small (≥ 2 mm, e.g., cigarette butts) debris from soft-sand environments.
We hypothesize that its integrated scooper-sieve system will achieve ≥ 90% collection efficiency across debris sizes, while the ML vision model maintains ≥ 95% accuracy in distinguishing litter such as caps and wrappers from natural materials including seaweed and rocks.
Key Capabilities
ML-Based Vision
Machine learning model distinguishes trash from natural materials like seaweed and rocks with high accuracy.
Mechanical Sieving
Integrated scooper-sieve system collects debris while filtering out sand through a 2mm mesh.
Autonomous Operation
Fully autonomous patrol and collection on soft-sand beach environments without human intervention.
Recognition
DuneBroom was recognized as one of the Conrad Challenge Innovators, highlighting the project's student-led approach to environmental problem solving.
Learn about Conrad Innovators →